Comparing change-point pruning methods using square loss
The goal of this post is to compare two pruning methods for speeding up the optimal partitioning algorithm, similar to my previous post using the Poisson loss.
- We assume that we want to find change-points in a sequence of
Ndata. - All algorithms discussed are instances of dynamic programming, which
has a for loop over all
Ndata. In each iteration, the algorithm considers a certain number of candidate change-pointsC(on average). The algorithm is overallO(NC)time. - Optimal partitioning (OPART) computes the best segmentation for a
given loss function, data sequence, and non-negative penalty
value. Each iteration considers the loss for each previous candidate
change-point,
C=O(N)linear time per iteration, which implies quadraticO(N^2)time overall. - Pruned Exact Linear Time (PELT) reduces the number of candidate
change-points that must be considered at each iteration, from the
whole data sequence size
N, to the size of a segmentS, soC=O(S). This gives an algorithm which isO(NS)time overall.- If the number of change-points grows linearly with the data size
N, then the segment size is constant,S=O(1)with respect to number of dataN, and the PELT algorithm is indeed linear time overall,O(N). - However in the case of a constant number of change-points, with
segment sizes that grow with the data sequence,
S=O(N)implies quadratic time overall,O(N^2).
- If the number of change-points grows linearly with the data size
- Functional Pruning Optimal Partitioning (FPOP) reduces the number of
candidate change-points to a number which is always less than the
number considered by PELT (see Maidstone 2017 paper for detailed
proof). The goal of this post is to show that it prunes more than
PELT in both cases:
- If the number of change-points grows linearly with the data size
N, then both PELT and FPOP areO(N)overall. - If the number of change-points is constant with respect to data
size
N, then FPOP considers onlyS=O(log N)change-points (empirically), which gives an algorithm that isO(N log N), log-linear time overall.
- If the number of change-points grows linearly with the data size
Simulate data sequences
We simulate data in two scenarios: linear and constant number of changes.
mean_vec <- c(10,20,5,25)
sim_fun_list <- list(
constant_changes=function(N){
rep(mean_vec, each=N/4)
},
linear_changes=function(N){
rep(rep(mean_vec, each=10), l=N)
})
lapply(sim_fun_list, function(f)f(40))
## $constant_changes
## [1] 10 10 10 10 10 10 10 10 10 10 20 20 20 20 20 20 20 20 20 20 5 5 5 5 5 5 5 5 5 5 25 25 25 25 25 25 25 25
## [39] 25 25
##
## $linear_changes
## [1] 10 10 10 10 10 10 10 10 10 10 20 20 20 20 20 20 20 20 20 20 5 5 5 5 5 5 5 5 5 5 25 25 25 25 25 25 25 25
## [39] 25 25
As can be seen above, both functions return a vector of values that represent the true segment mean. Below we use both functions with a three different data sizes.
library(data.table)
N_data_vec <- c(40, 400)
sim_data_list <- list()
sim_changes_list <- list()
sim_segs_list <- list()
for(N_data in N_data_vec){
for(simulation in names(sim_fun_list)){
sim_fun <- sim_fun_list[[simulation]]
data_mean_vec <- sim_fun(N_data)
end <- which(diff(data_mean_vec) != 0)
set.seed(1)
data_value <- rnorm(N_data, data_mean_vec, 2)
cum.vec <- c(0, cumsum(data_value))
n.segs <- sum(diff(data_mean_vec)!=0)+1
wfit <- fpopw::Fpsn(data_value, n.segs)
end <- wfit$t.est[n.segs, 1:n.segs]
start <- c(1, end[-length(end)]+1)
sim_segs_list[[paste(N_data, simulation)]] <- data.table(
N_data, simulation, start.pos=start-0.5, end.pos=end+0.5,
mean=(cum.vec[end+1]-cum.vec[start])/(end-start+1))
sim_data_list[[paste(N_data, simulation)]] <- data.table(
N_data, simulation, data_i=seq_along(data_value), data_value)
sim_changes_list[[paste(N_data, simulation)]] <- data.table(
N_data, simulation, end)
}
}
addSim <- function(DT)DT[, Simulation := paste0("\n", simulation)][]
(sim_changes <- addSim(rbindlist(sim_changes_list)))
## N_data simulation end Simulation
## <num> <char> <num> <char>
## 1: 40 constant_changes 10 \nconstant_changes
## 2: 40 constant_changes 20 \nconstant_changes
## 3: 40 constant_changes 30 \nconstant_changes
## 4: 40 constant_changes 40 \nconstant_changes
## 5: 40 linear_changes 10 \nlinear_changes
## 6: 40 linear_changes 20 \nlinear_changes
## 7: 40 linear_changes 30 \nlinear_changes
## 8: 40 linear_changes 40 \nlinear_changes
## 9: 400 constant_changes 100 \nconstant_changes
## 10: 400 constant_changes 200 \nconstant_changes
## 11: 400 constant_changes 300 \nconstant_changes
## 12: 400 constant_changes 400 \nconstant_changes
## 13: 400 linear_changes 10 \nlinear_changes
## 14: 400 linear_changes 20 \nlinear_changes
## 15: 400 linear_changes 30 \nlinear_changes
## 16: 400 linear_changes 40 \nlinear_changes
## 17: 400 linear_changes 50 \nlinear_changes
## 18: 400 linear_changes 60 \nlinear_changes
## 19: 400 linear_changes 70 \nlinear_changes
## 20: 400 linear_changes 80 \nlinear_changes
## 21: 400 linear_changes 90 \nlinear_changes
## 22: 400 linear_changes 100 \nlinear_changes
## 23: 400 linear_changes 110 \nlinear_changes
## 24: 400 linear_changes 120 \nlinear_changes
## 25: 400 linear_changes 130 \nlinear_changes
## 26: 400 linear_changes 140 \nlinear_changes
## 27: 400 linear_changes 150 \nlinear_changes
## 28: 400 linear_changes 160 \nlinear_changes
## 29: 400 linear_changes 170 \nlinear_changes
## 30: 400 linear_changes 180 \nlinear_changes
## 31: 400 linear_changes 190 \nlinear_changes
## 32: 400 linear_changes 200 \nlinear_changes
## 33: 400 linear_changes 210 \nlinear_changes
## 34: 400 linear_changes 220 \nlinear_changes
## 35: 400 linear_changes 230 \nlinear_changes
## 36: 400 linear_changes 240 \nlinear_changes
## 37: 400 linear_changes 250 \nlinear_changes
## 38: 400 linear_changes 260 \nlinear_changes
## 39: 400 linear_changes 270 \nlinear_changes
## 40: 400 linear_changes 280 \nlinear_changes
## 41: 400 linear_changes 290 \nlinear_changes
## 42: 400 linear_changes 300 \nlinear_changes
## 43: 400 linear_changes 310 \nlinear_changes
## 44: 400 linear_changes 320 \nlinear_changes
## 45: 400 linear_changes 330 \nlinear_changes
## 46: 400 linear_changes 340 \nlinear_changes
## 47: 400 linear_changes 350 \nlinear_changes
## 48: 400 linear_changes 360 \nlinear_changes
## 49: 400 linear_changes 370 \nlinear_changes
## 50: 400 linear_changes 380 \nlinear_changes
## 51: 400 linear_changes 390 \nlinear_changes
## 52: 400 linear_changes 400 \nlinear_changes
## N_data simulation end Simulation
## <num> <char> <num> <char>
Above we see the table of simulated change-points.
Below we visualize one of the simulated data sets.
library(ggplot2)
one_sim <- sim_data_list[["40 constant_changes"]]
gg <- ggplot()+
theme_bw()+
theme(text=element_text(size=14))+
geom_point(aes(
data_i, data_value),
color="grey50",
data=one_sim)+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=10))
gg
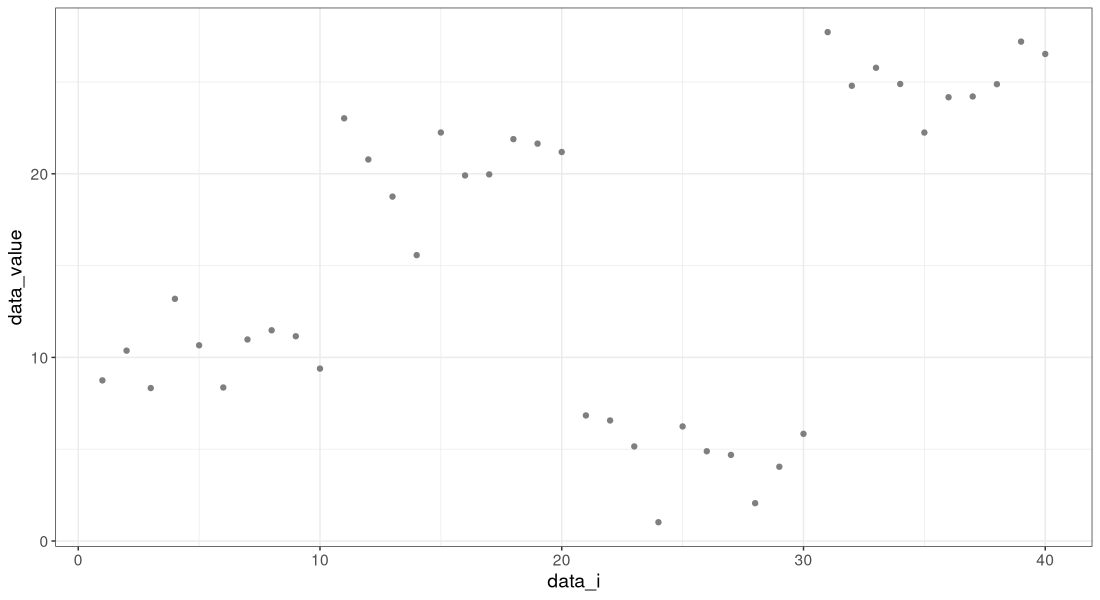
The figure above shows a simulated data set with 40 points.
wfit <- fpopw::Fpop(one_sim$data_value, 50)
cum.vec <- c(0, cumsum(one_sim$data_value))
end <- wfit$t.est
start <- c(1, end[-length(end)]+1)
one_sim_means <- data.table(
start.pos=start-0.5, end.pos=end+0.5,
mean=(cum.vec[end+1]-cum.vec[start])/(end-start+1))
gg+
geom_vline(aes(
xintercept=start.pos),
color="green",
linetype="dashed",
data=one_sim_means[-1])+
geom_segment(aes(
start.pos, mean,
xend=end.pos, yend=mean),
color="green",
data=one_sim_means)
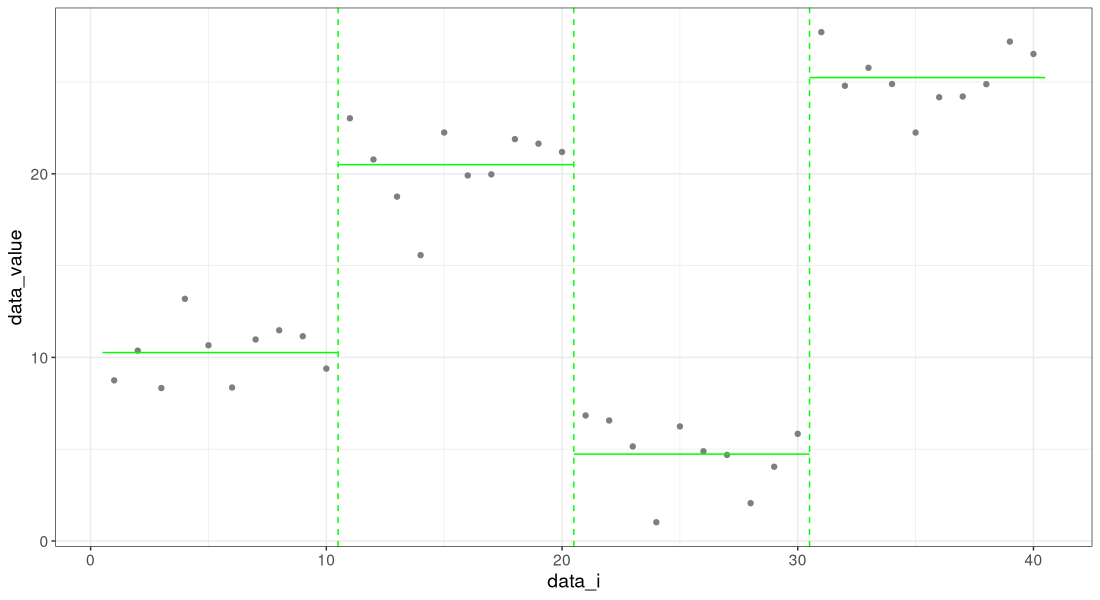
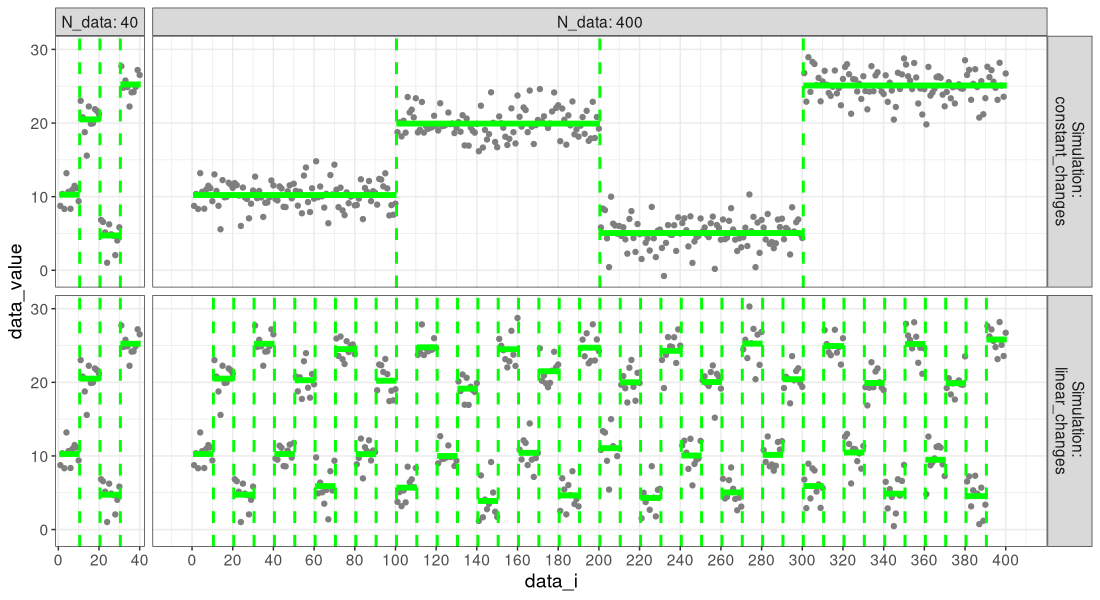
Below we show all simulations:
- For
constant_changessimulation, there are always 3 change-points. - For
linear_changessimulation, there are more change-points when there are more data.
(sim_data <- addSim(rbindlist(sim_data_list)))
## N_data simulation data_i data_value Simulation
## <num> <char> <int> <num> <char>
## 1: 40 constant_changes 1 8.747092 \nconstant_changes
## 2: 40 constant_changes 2 10.367287 \nconstant_changes
## 3: 40 constant_changes 3 8.328743 \nconstant_changes
## 4: 40 constant_changes 4 13.190562 \nconstant_changes
## 5: 40 constant_changes 5 10.659016 \nconstant_changes
## ---
## 876: 400 linear_changes 396 23.151374 \nlinear_changes
## 877: 400 linear_changes 397 28.185828 \nlinear_changes
## 878: 400 linear_changes 398 25.090021 \nlinear_changes
## 879: 400 linear_changes 399 23.569743 \nlinear_changes
## 880: 400 linear_changes 400 26.730446 \nlinear_changes
library(ggplot2)
gg <- ggplot()+
theme_bw()+
theme(text=element_text(size=14))+
geom_point(aes(
data_i, data_value),
color="grey50",
data=sim_data)+
facet_grid(Simulation ~ N_data, labeller=label_both, scales="free_x", space="free")+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=20))
gg
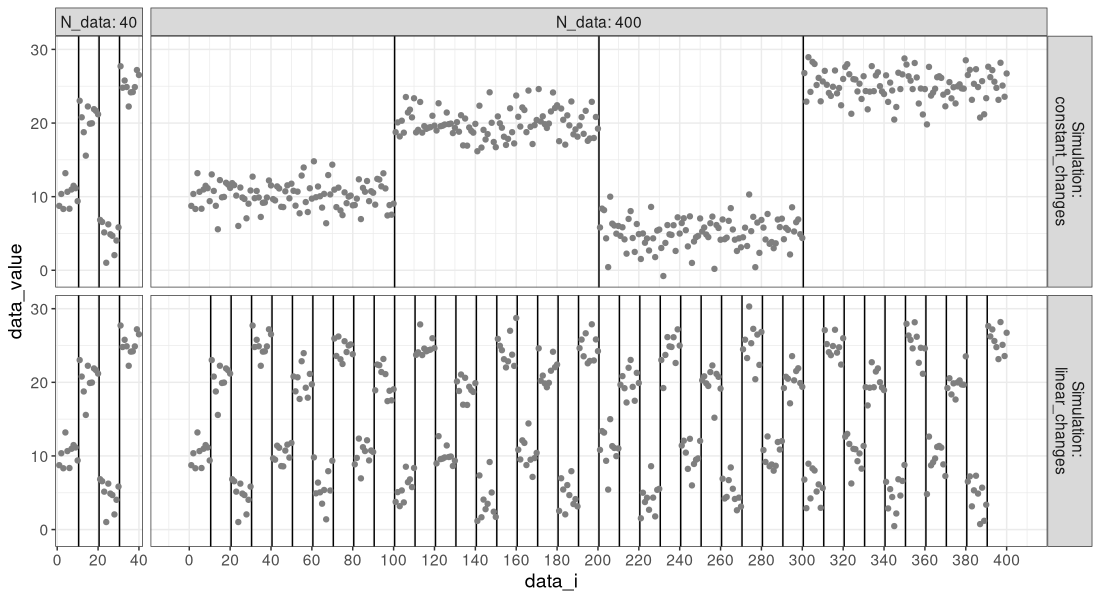
We see in the figure above that the data are the same in the two simulations, when there are only 40 data points. However, when there are 80 or 160 data, we see a difference:
- For the
constant_changessimulation, the number of change-points is still three (change-point every quarter of the data). - For the
linear_changessimulation, the number of change-points has increased from 3 to 7 to 15 (change-point every 25 data points).
Below we highlight the true change-points,
gg+
geom_vline(aes(
xintercept=end+0.5),
data=sim_changes)
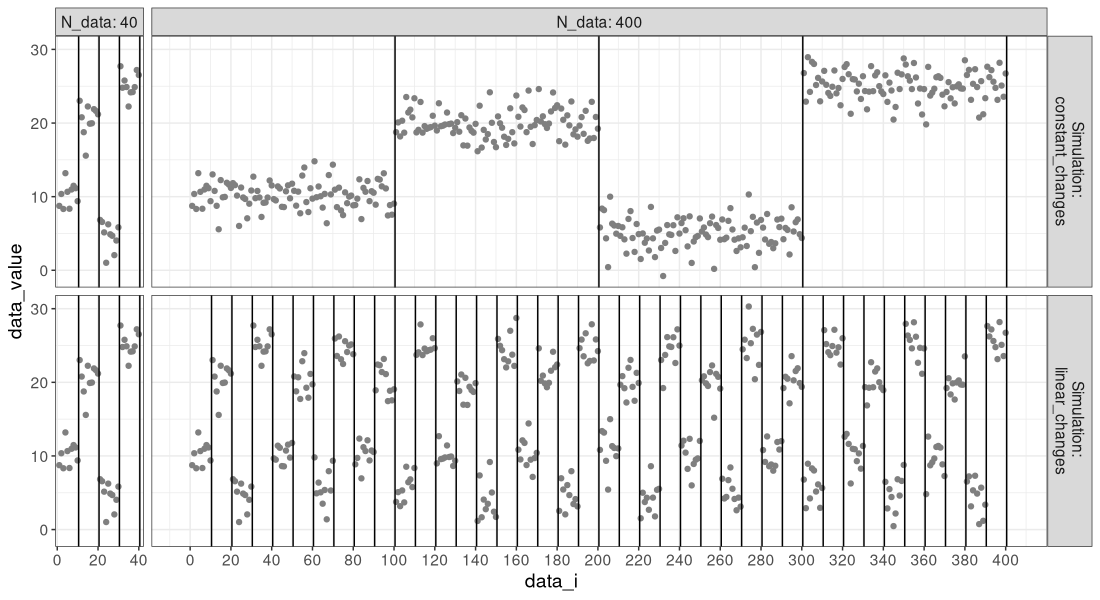
And below we show the estimated means and change-points:
sim_segs <- addSim(rbindlist(sim_segs_list))
gg+
geom_vline(aes(
xintercept=start.pos),
color="green",
linetype="dashed",
size=1,
data=sim_segs[1<start.pos])+
geom_segment(aes(
start.pos, mean,
xend=end.pos, yend=mean),
data=sim_segs,
color="green",
size=2)
## Warning: Using `size` aesthetic for lines was deprecated in ggplot2 3.4.0.
## ℹ Please use `linewidth` instead.
## This warning is displayed once every 8 hours.
## Call `lifecycle::last_lifecycle_warnings()` to see where this warning was generated.
PELT
Below we define a function which implements PELT for the Poisson loss, because we used a count data simulation above.
PELT <- function(sim.mat, penalty, prune=TRUE, verbose=FALSE){
if(!is.matrix(sim.mat))sim.mat <- cbind(sim.mat)
cum.data <- rbind(0, apply(sim.mat, 2, cumsum))
sum_trick <- function(m, start, end)m[end+1,,drop=FALSE]-m[start,,drop=FALSE]
cost_trick <- function(start, end){
sum_vec <- sum_trick(cum.data, start, end)
N <- end+1-start
-sum_vec^2/N
}
N.data <- nrow(sim.mat)
pelt.change.vec <- rep(NA_integer_, N.data)
pelt.cost.vec <- rep(NA_real_, N.data+1)
pelt.cost.vec[1] <- -penalty
pelt.candidates.vec <- rep(NA_integer_, N.data)
candidate.vec <- 1L
if(verbose)index_dt_list <- list()
for(up.to in 1:N.data){
N.cand <- length(candidate.vec)
pelt.candidates.vec[up.to] <- N.cand
last.seg.cost <- rowSums(cost_trick(candidate.vec, rep(up.to, N.cand)))
prev.cost <- pelt.cost.vec[candidate.vec]
cost.no.penalty <- prev.cost+last.seg.cost
total.cost <- cost.no.penalty+penalty
if(verbose)index_dt_list[[up.to]] <- data.table(
data_i=up.to, change_i=candidate.vec, cost=total.cost/up.to)
best.i <- which.min(total.cost)
pelt.change.vec[up.to] <- candidate.vec[best.i]
total.cost.best <- total.cost[best.i]
pelt.cost.vec[up.to+1] <- total.cost.best
keep <- if(isTRUE(prune))cost.no.penalty < total.cost.best else TRUE
candidate.vec <- c(candidate.vec[keep], up.to+1L)
}
list(
change=pelt.change.vec,
cost=pelt.cost.vec,
candidates=pelt.candidates.vec,
index_dt=if(verbose)rbindlist(index_dt_list))
}
decode <- function(best.change){
seg.dt.list <- list()
last.i <- length(best.change)
while(last.i>0){
first.i <- best.change[last.i]
seg.dt.list[[paste(last.i)]] <- data.table(
first.i, last.i)
last.i <- first.i-1L
}
rbindlist(seg.dt.list)[seq(.N,1)]
}
pelt_info_list <- list()
pelt_segs_list <- list()
both_index_list <- list()
penalty <- 100
algo.prune <- c(
OPART=FALSE,
PELT=TRUE)
for(N_data in N_data_vec){
for(simulation in names(sim_fun_list)){
N_sim <- paste(N_data, simulation)
data_value <- sim_data_list[[N_sim]]$data_value
for(algo in names(algo.prune)){
prune <- algo.prune[[algo]]
fit <- PELT(data_value, penalty=penalty, prune=prune, verbose = TRUE)
both_index_list[[paste(N_data, simulation, algo)]] <- data.table(
N_data, simulation, algo, fit$index_dt)
fit_seg_dt <- decode(fit$change)
pelt_info_list[[paste(N_data,simulation,algo)]] <- data.table(
N_data,simulation,algo,
candidates=fit$candidates,
cost=fit$cost[-1],
data_i=seq_along(data_value))
pelt_segs_list[[paste(N_data,simulation,algo)]] <- data.table(
N_data,simulation,algo,
fit_seg_dt)
}
}
}
(pelt_info <- addSim(rbindlist(pelt_info_list)))
## N_data simulation algo candidates cost data_i Simulation
## <num> <char> <char> <int> <num> <int> <char>
## 1: 40 constant_changes OPART 1 -76.51163 1 \nconstant_changes
## 2: 40 constant_changes OPART 2 -182.67974 2 \nconstant_changes
## 3: 40 constant_changes OPART 3 -251.04164 3 \nconstant_changes
## 4: 40 constant_changes OPART 4 -412.77406 4 \nconstant_changes
## 5: 40 constant_changes OPART 5 -526.18819 5 \nconstant_changes
## ---
## 1756: 400 linear_changes PELT 6 -109335.43620 396 \nlinear_changes
## 1757: 400 linear_changes PELT 7 -110124.86554 397 \nlinear_changes
## 1758: 400 linear_changes PELT 8 -110753.45859 398 \nlinear_changes
## 1759: 400 linear_changes PELT 9 -111303.80462 399 \nlinear_changes
## 1760: 400 linear_changes PELT 10 -112017.39690 400 \nlinear_changes
(pelt_segs <- addSim(rbindlist(pelt_segs_list)))
## N_data simulation algo first.i last.i Simulation
## <num> <char> <char> <int> <int> <char>
## 1: 40 constant_changes OPART 1 10 \nconstant_changes
## 2: 40 constant_changes OPART 11 20 \nconstant_changes
## 3: 40 constant_changes OPART 21 30 \nconstant_changes
## 4: 40 constant_changes OPART 31 40 \nconstant_changes
## 5: 40 constant_changes PELT 1 10 \nconstant_changes
## ---
## 100: 400 linear_changes PELT 351 360 \nlinear_changes
## 101: 400 linear_changes PELT 361 370 \nlinear_changes
## 102: 400 linear_changes PELT 371 380 \nlinear_changes
## 103: 400 linear_changes PELT 381 390 \nlinear_changes
## 104: 400 linear_changes PELT 391 400 \nlinear_changes
We see in the result tables above that the segmentations are the same, using pruning and no pruning. Below we visualize the number of candidates considered.
algo.colors <- c(
OPART="grey50",
PELT="red",
FPOP="blue",
DUST="deepskyblue")
cat(paste0("\\definecolor{", names(algo.colors), "}{HTML}{", sub("#", "", animint2::toRGB(algo.colors)), "}\n"))
## Registered S3 methods overwritten by 'animint2':
## method from
## [.uneval ggplot2
## drawDetails.zeroGrob ggplot2
## grid.draw.absoluteGrob ggplot2
## grobHeight.absoluteGrob ggplot2
## grobHeight.zeroGrob ggplot2
## grobWidth.absoluteGrob ggplot2
## grobWidth.zeroGrob ggplot2
## grobX.absoluteGrob ggplot2
## grobY.absoluteGrob ggplot2
## heightDetails.titleGrob ggplot2
## heightDetails.zeroGrob ggplot2
## makeContext.dotstackGrob ggplot2
## print.element ggplot2
## print.ggplot2_bins ggplot2
## print.rel ggplot2
## print.theme ggplot2
## print.uneval ggplot2
## widthDetails.titleGrob ggplot2
## widthDetails.zeroGrob ggplot2
## \definecolor{OPART}{HTML}{7F7F7F}
## \definecolor{PELT}{HTML}{FF0000}
## \definecolor{FPOP}{HTML}{0000FF}
## \definecolor{DUST}{HTML}{00BFFF}
ggplot()+
theme_bw()+
theme(
legend.position=c(0.8, 0.2),
panel.spacing=grid::unit(1,"lines"),
text=element_text(size=15))+
geom_vline(aes(
xintercept=end+0.5),
data=sim_changes)+
scale_color_manual(
breaks=names(algo.colors),
values=algo.colors)+
geom_point(aes(
data_i, candidates, color=algo),
data=pelt_info)+
facet_grid(Simulation ~ N_data, labeller=label_both, scales="free_x", space="free")+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=20))+
scale_y_continuous(
breaks=c(10, 100, 400))+
theme(panel.grid.minor=element_blank())+
coord_cartesian(expand=FALSE)
## Warning: A numeric `legend.position` argument in `theme()` was deprecated in ggplot2 3.5.0.
## ℹ Please use the `legend.position.inside` argument of `theme()` instead.
## This warning is displayed once every 8 hours.
## Call `lifecycle::last_lifecycle_warnings()` to see where this warning was generated.
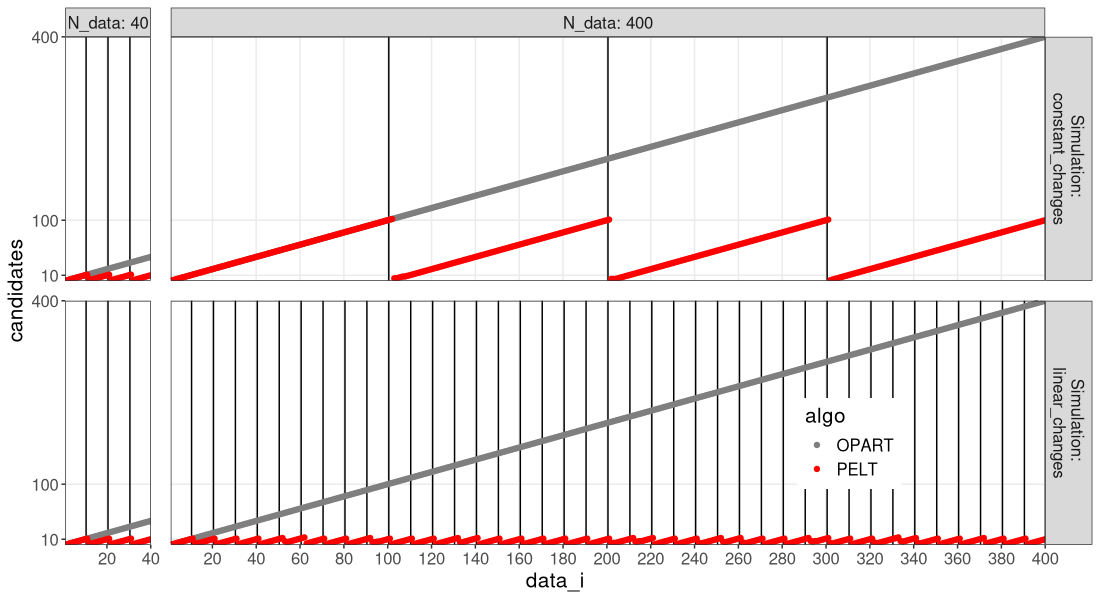
We can see in the figure above that PELT considers a much smaller number of change-points, that tends to reset near zero, for each change-point detected.
- In the bottom simulation with linear changes, the number of change-point candidates considered by PELT is constant (does not depend on number of data), so PELT is linear time, whereas OPART is quadratic, in the number of data.
- In the top simulation with constant changes, the number of change-point candidates considered by PELT is linear in the number of data, so both OPART and PELT are quadratic time in the number of data.
FPOP
Now we run FPOP, which is another pruning method, which is more complex to implement efficiently, so we use C++ code in the R package fpopw. In fact, the current CRAN version of fpopw (1.1) does not include the code which is used to write the candidate change-points considered at each iteration of dynamic programming, so we need to install my version from GitHub.
remotes::install_github("tdhock/fpopw/fpopw")
## Using github PAT from envvar GITHUB_PAT. Use `gitcreds::gitcreds_set()` and unset GITHUB_PAT in .Renviron (or elsewhere) if you want to use the more secure git credential store instead.
## Downloading GitHub repo tdhock/fpopw@HEAD
## ── R CMD build ─────────────────────────────────────────────────────────────────────────────────────────────────
##
checking for file ‘/tmp/Rtmp3bxDpD/remotes1832b711e8f3a8/tdhock-fpopw-9d8c9a9/fpopw/DESCRIPTION’ ...
✔ checking for file ‘/tmp/Rtmp3bxDpD/remotes1832b711e8f3a8/tdhock-fpopw-9d8c9a9/fpopw/DESCRIPTION’
##
─ preparing ‘fpopw’:
## checking DESCRIPTION meta-information ...
✔ checking DESCRIPTION meta-information
## ─ cleaning src
##
─ checking for LF line-endings in source and make files and shell scripts
##
─ checking for empty or unneeded directories
##
─ building ‘fpopw_1.2.tar.gz’
##
Avis : valeur uid incorrecte remplacée par celle pour l'utilisateur 'nobody'
## Avis : valeur gid incorrecte remplacée par celle pour l'utilisateur 'nobody'
##
##
fpop_info_list <- list()
fpop_segs_list <- list()
for(N_data in N_data_vec){
for(simulation in names(sim_fun_list)){
N_sim <- paste(N_data, simulation)
data_value <- sim_data_list[[N_sim]]$data_value
pfit <- fpopw::Fpop(
data_value, penalty, verbose_file=tempfile())
both_index_list[[paste(N_data, simulation, "FPOP")]] <- data.table(
N_data, simulation, algo="FPOP", pfit$model
)[, let(
data_i=data_i+1L,
change_i=ifelse(change_i == -10, 0, change_i)+1
)][]
end <- pfit$t.est
start <- c(1, end[-length(end)]+1)
count_dt <- pfit$model[, .(
intervals=.N,
cost=min(cost)
), by=data_i]
fpop_info_list[[paste(N_data,simulation)]] <- data.table(
N_data,simulation,
algo="FPOP",
candidates=count_dt$intervals,
cost=count_dt$cost,
data_i=seq_along(data_value))
fpop_segs_list[[paste(N_data,simulation)]] <- data.table(
N_data,simulation,start,end)
}
}
(fpop_info <- addSim(rbindlist(fpop_info_list)))
## N_data simulation algo candidates cost data_i Simulation
## <num> <char> <char> <int> <num> <int> <char>
## 1: 40 constant_changes FPOP 1 -76.5116 1 \nconstant_changes
## 2: 40 constant_changes FPOP 2 -182.6800 2 \nconstant_changes
## 3: 40 constant_changes FPOP 3 -251.0420 3 \nconstant_changes
## 4: 40 constant_changes FPOP 3 -412.7740 4 \nconstant_changes
## 5: 40 constant_changes FPOP 4 -526.1880 5 \nconstant_changes
## ---
## 876: 400 linear_changes FPOP 2 -109335.0000 396 \nlinear_changes
## 877: 400 linear_changes FPOP 4 -110125.0000 397 \nlinear_changes
## 878: 400 linear_changes FPOP 3 -110753.0000 398 \nlinear_changes
## 879: 400 linear_changes FPOP 3 -111304.0000 399 \nlinear_changes
## 880: 400 linear_changes FPOP 4 -112017.0000 400 \nlinear_changes
(fpop_segs <- rbindlist(fpop_segs_list))
## N_data simulation start end
## <num> <char> <num> <int>
## 1: 40 constant_changes 1 10
## 2: 40 constant_changes 11 20
## 3: 40 constant_changes 21 30
## 4: 40 constant_changes 31 40
## 5: 40 linear_changes 1 10
## 6: 40 linear_changes 11 20
## 7: 40 linear_changes 21 30
## 8: 40 linear_changes 31 40
## 9: 400 constant_changes 1 100
## 10: 400 constant_changes 101 200
## 11: 400 constant_changes 201 300
## 12: 400 constant_changes 301 400
## 13: 400 linear_changes 1 10
## 14: 400 linear_changes 11 20
## 15: 400 linear_changes 21 30
## 16: 400 linear_changes 31 40
## 17: 400 linear_changes 41 50
## 18: 400 linear_changes 51 60
## 19: 400 linear_changes 61 70
## 20: 400 linear_changes 71 80
## 21: 400 linear_changes 81 90
## 22: 400 linear_changes 91 100
## 23: 400 linear_changes 101 110
## 24: 400 linear_changes 111 120
## 25: 400 linear_changes 121 130
## 26: 400 linear_changes 131 140
## 27: 400 linear_changes 141 150
## 28: 400 linear_changes 151 160
## 29: 400 linear_changes 161 170
## 30: 400 linear_changes 171 180
## 31: 400 linear_changes 181 190
## 32: 400 linear_changes 191 200
## 33: 400 linear_changes 201 210
## 34: 400 linear_changes 211 220
## 35: 400 linear_changes 221 230
## 36: 400 linear_changes 231 240
## 37: 400 linear_changes 241 250
## 38: 400 linear_changes 251 260
## 39: 400 linear_changes 261 270
## 40: 400 linear_changes 271 280
## 41: 400 linear_changes 281 290
## 42: 400 linear_changes 291 300
## 43: 400 linear_changes 301 310
## 44: 400 linear_changes 311 320
## 45: 400 linear_changes 321 330
## 46: 400 linear_changes 331 340
## 47: 400 linear_changes 341 350
## 48: 400 linear_changes 351 360
## 49: 400 linear_changes 361 370
## 50: 400 linear_changes 371 380
## 51: 400 linear_changes 381 390
## 52: 400 linear_changes 391 400
## N_data simulation start end
## <num> <char> <num> <int>
both_info <- rbind(pelt_info, fpop_info)
ggplot()+
theme_bw()+
theme(
legend.position=c(0.8, 0.2),
panel.spacing=grid::unit(1,"lines"),
text=element_text(size=15))+
geom_vline(aes(
xintercept=end+0.5),
data=sim_changes)+
scale_color_manual(
breaks=names(algo.colors),
values=algo.colors)+
geom_point(aes(
data_i, candidates, color=algo),
data=both_info)+
facet_grid(Simulation ~ N_data, labeller=label_both, scales="free_x", space="free")+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=20))+
scale_y_continuous(
breaks=c(10, 100, 400))+
theme(panel.grid.minor=element_blank())+
coord_cartesian(expand=FALSE)
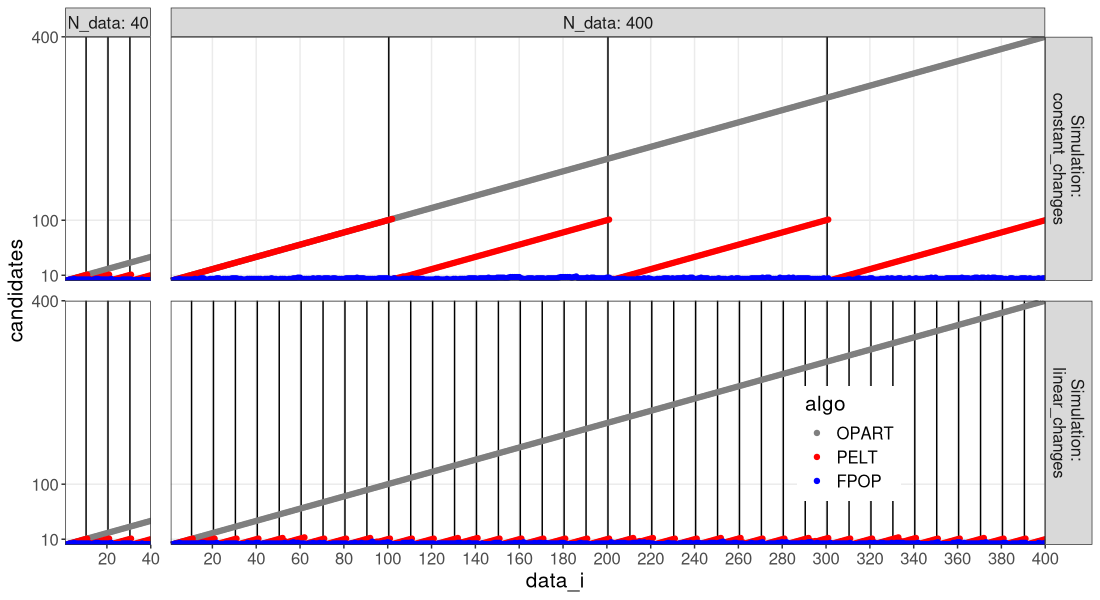
In the figure above, we can see the advantage of FPOP: the number of change-points considered does not increase with the number of data, even with constant number of changes (larger segments).
- In the top simulation with constant changes, the number of change-points candidates considered is linear in the number of data, so both OPART and PELT are quadratic time in the number of data, whereas FPOP is sub-quadratic (empirically linear or log-linear).
The table below compares the cost and number of candidates for the last data point.
both_info[data_i==max(data_i)][order(simulation, algo)]
## N_data simulation algo candidates cost data_i Simulation
## <num> <char> <char> <int> <num> <int> <char>
## 1: 400 constant_changes FPOP 5 -115415.0 400 \nconstant_changes
## 2: 400 constant_changes OPART 400 -115415.2 400 \nconstant_changes
## 3: 400 constant_changes PELT 100 -115415.2 400 \nconstant_changes
## 4: 400 linear_changes FPOP 4 -112017.0 400 \nlinear_changes
## 5: 400 linear_changes OPART 400 -112017.4 400 \nlinear_changes
## 6: 400 linear_changes PELT 10 -112017.4 400 \nlinear_changes
We see above that in both simulations, all three algos compute the same cost. We also see that the number of candidates is smallest for FPOP in both simulations. PELT has substantial pruning (10 candidates) for the case of linear changes, but not much pruning (100 candidates) for the case of constant changes.
DuST
DuST is a new pruning technique based on Lagrange duality, proposed by Truong and Runge, Stat, 2024.
remotes::install_github("vrunge/dust@910f8c67f99354fdb5ff7740e6436eb487d9efa6")
## Using github PAT from envvar GITHUB_PAT. Use `gitcreds::gitcreds_set()` and unset GITHUB_PAT in .Renviron (or elsewhere) if you want to use the more secure git credential store instead.
## Downloading GitHub repo vrunge/dust@910f8c67f99354fdb5ff7740e6436eb487d9efa6
## These packages have more recent versions available.
## It is recommended to update all of them.
## Which would you like to update?
##
## 1: All
## 2: CRAN packages only
## 3: None
## 4: RcppArmad... (14.4.1-1 -> 14.4.3-1) [CRAN]
##
## ── R CMD build ─────────────────────────────────────────────────────────────────────────────────────────────────
##
checking for file ‘/tmp/Rtmp3bxDpD/remotes1832b7352b6c2c/vrunge-dust-910f8c6/DESCRIPTION’ ...
✔ checking for file ‘/tmp/Rtmp3bxDpD/remotes1832b7352b6c2c/vrunge-dust-910f8c6/DESCRIPTION’
##
─ preparing ‘dust’:
## checking DESCRIPTION meta-information ...
✔ checking DESCRIPTION meta-information
## ─ cleaning src
##
─ checking for LF line-endings in source and make files and shell scripts
##
─ checking for empty or unneeded directories
##
Omitted ‘LazyData’ from DESCRIPTION
##
─ building ‘dust_0.3.0.tar.gz’
##
Avis : valeur uid incorrecte remplacée par celle pour l'utilisateur 'nobody'
## Avis : valeur gid incorrecte remplacée par celle pour l'utilisateur 'nobody'
##
##
set.seed(1)
ex_data <- rnorm(7)
ex_penalty <- 1
dfit <- dust::dust.1D(ex_data, ex_penalty)
wfit <- fpopw::Fpop(ex_data, ex_penalty)
pfit <- PELT(ex_data, ex_penalty)
list(PELT=pfit$change, FPOP=wfit$path, DUST=dfit$changepoints)
## $PELT
## [1] 1 1 1 4 4 5 5
##
## $FPOP
## [1] -10 -10 -10 3 3 4 4
##
## $DUST
## [1] 7
rbind(
PELT=pfit$cost[-1]/seq_along(ex_data),
FPOP=(wfit$cost-ex_penalty)/seq_along(ex_data),
DUST=2*dfit$costQ/seq_along(ex_data))
## [,1] [,2] [,3] [,4] [,5] [,6] [,7]
## PELT -0.3924444 -0.04902028 -0.1816007 -0.5224308 -0.27944154 -0.2017073626 -0.155675310
## FPOP -0.3924444 -0.04902028 -0.1816007 -0.5224308 -0.27944154 -0.2017073626 -0.155675310
## DUST -0.3924444 -0.04902028 -0.1816007 -0.2724308 -0.07944154 -0.0008421498 -0.002003332
The code above verifies that we compute the cost in the same way for each algorithm. In particular, PELT and DUST return the total cost, so we need to divide by the number of data points to get the average cost, which is returned by FPOP. Below we compute the candidates considered by DUST, for each of the two simulations, and a variety of data sizes.
dust_info_list <- list()
dust_segs_list <- list()
for(N_data in N_data_vec){
for(simulation in names(sim_fun_list)){
N_sim <- paste(N_data, simulation)
data_value <- sim_data_list[[N_sim]]$data_value
dfit <- dust::dust.object.1D("gauss")
candidates <- rep(NA_integer_, N_data)
for(data_i in seq_along(data_value)){
dfit$append_c(data_value[[data_i]], penalty)
dfit$update_partition()
pinfo <- dfit$get_partition()
change_i <- pinfo$lastIndexSet[-1]+1L
candidates[[data_i]] <- length(change_i)
mean_cost <- pinfo$costQ/seq_along(pinfo$costQ)
both_index_list[[paste(
N_data, simulation, "DUST", data_i
)]] <- data.table(
N_data, simulation, algo="DUST", data_i,
change_i, cost=mean_cost[change_i])
}
end <- pinfo$changepoints
start <- c(1, end[-length(end)]+1)
dust_info_list[[paste(N_data,simulation)]] <- data.table(
N_data,simulation,
algo="DUST",
candidates,
cost=pinfo$costQ,
data_i=seq_along(data_value))
dust_segs_list[[paste(N_data,simulation)]] <- data.table(
N_data,simulation,start,end)
}
}
(dust_info <- addSim(rbindlist(dust_info_list)))
## N_data simulation algo candidates cost data_i Simulation
## <num> <char> <char> <int> <num> <int> <char>
## 1: 40 constant_changes DUST 1 -38.25581 1 \nconstant_changes
## 2: 40 constant_changes DUST 1 -91.33987 2 \nconstant_changes
## 3: 40 constant_changes DUST 1 -125.52082 3 \nconstant_changes
## 4: 40 constant_changes DUST 1 -206.38703 4 \nconstant_changes
## 5: 40 constant_changes DUST 1 -263.09410 5 \nconstant_changes
## ---
## 876: 400 linear_changes DUST 1 -52717.71810 396 \nlinear_changes
## 877: 400 linear_changes DUST 1 -53112.43277 397 \nlinear_changes
## 878: 400 linear_changes DUST 1 -53426.72930 398 \nlinear_changes
## 879: 400 linear_changes DUST 1 -53701.90231 399 \nlinear_changes
## 880: 400 linear_changes DUST 1 -54058.69845 400 \nlinear_changes
(dust_segs <- rbindlist(dust_segs_list))
## N_data simulation start end
## <num> <char> <num> <num>
## 1: 40 constant_changes 1 10
## 2: 40 constant_changes 11 20
## 3: 40 constant_changes 21 30
## 4: 40 constant_changes 31 40
## 5: 40 linear_changes 1 10
## 6: 40 linear_changes 11 20
## 7: 40 linear_changes 21 30
## 8: 40 linear_changes 31 40
## 9: 400 constant_changes 1 100
## 10: 400 constant_changes 101 200
## 11: 400 constant_changes 201 300
## 12: 400 constant_changes 301 400
## 13: 400 linear_changes 1 10
## 14: 400 linear_changes 11 20
## 15: 400 linear_changes 21 30
## 16: 400 linear_changes 31 40
## 17: 400 linear_changes 41 50
## 18: 400 linear_changes 51 60
## 19: 400 linear_changes 61 70
## 20: 400 linear_changes 71 80
## 21: 400 linear_changes 81 90
## 22: 400 linear_changes 91 100
## 23: 400 linear_changes 101 110
## 24: 400 linear_changes 111 120
## 25: 400 linear_changes 121 130
## 26: 400 linear_changes 131 140
## 27: 400 linear_changes 141 150
## 28: 400 linear_changes 151 160
## 29: 400 linear_changes 161 170
## 30: 400 linear_changes 171 180
## 31: 400 linear_changes 181 190
## 32: 400 linear_changes 191 200
## 33: 400 linear_changes 201 210
## 34: 400 linear_changes 211 220
## 35: 400 linear_changes 221 230
## 36: 400 linear_changes 231 240
## 37: 400 linear_changes 241 250
## 38: 400 linear_changes 251 260
## 39: 400 linear_changes 261 270
## 40: 400 linear_changes 271 280
## 41: 400 linear_changes 281 290
## 42: 400 linear_changes 291 300
## 43: 400 linear_changes 301 310
## 44: 400 linear_changes 311 320
## 45: 400 linear_changes 321 330
## 46: 400 linear_changes 331 340
## 47: 400 linear_changes 341 350
## 48: 400 linear_changes 351 360
## 49: 400 linear_changes 361 370
## 50: 400 linear_changes 371 380
## 51: 400 linear_changes 381 390
## 52: 400 linear_changes 391 400
## N_data simulation start end
## <num> <char> <num> <num>
three_info <- rbind(pelt_info, fpop_info, dust_info)
ggplot()+
theme_bw()+
theme(
legend.position=c(0.8, 0.2),
panel.spacing=grid::unit(1,"lines"),
text=element_text(size=15))+
geom_vline(aes(
xintercept=end+0.5),
data=sim_changes)+
scale_color_manual(
breaks=names(algo.colors),
values=algo.colors)+
geom_point(aes(
data_i, candidates, color=algo),
data=three_info)+
facet_grid(Simulation ~ N_data, labeller=label_both, scales="free_x", space="free")+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=20))+
scale_y_continuous(
breaks=c(10, 100, 400))+
coord_cartesian(expand=FALSE)
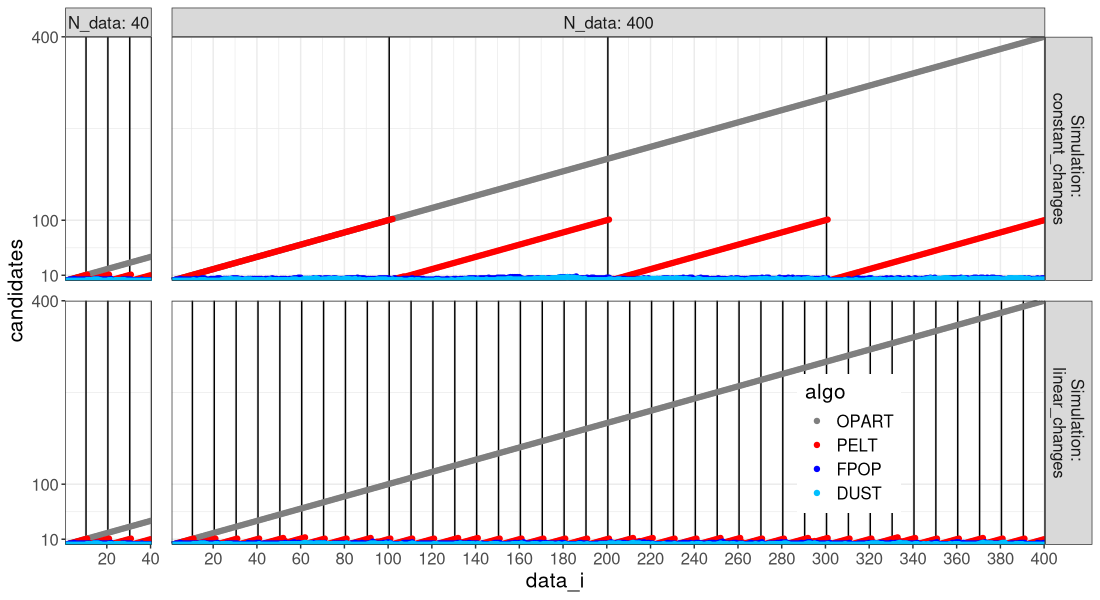
The figure above shows that DUST pruned much more than PELT, nearly the same amount as FPOP.
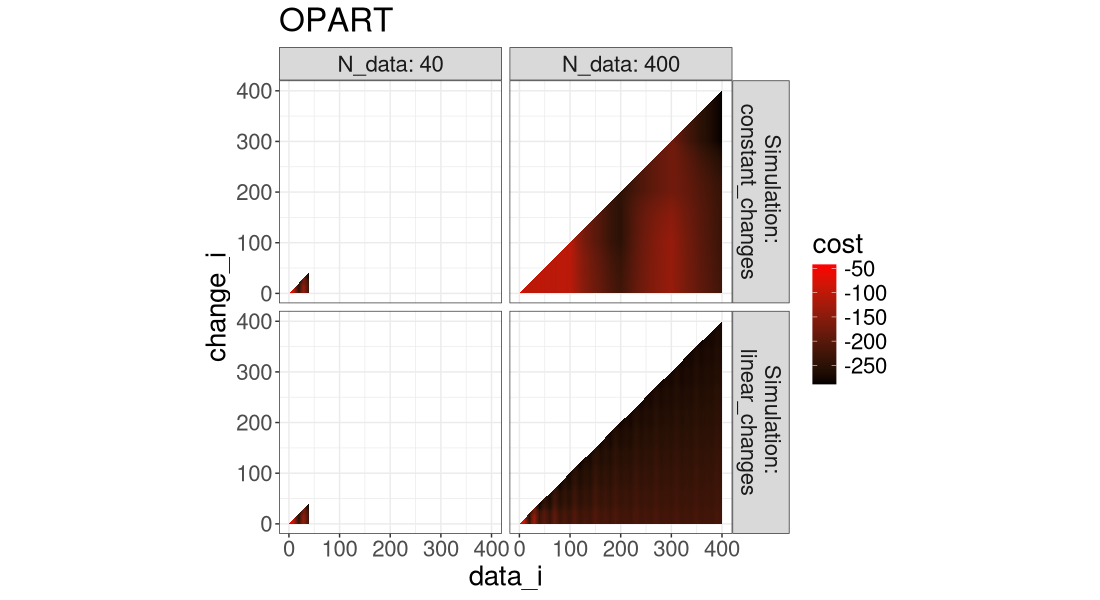
Heat maps
Another way to view this is by looking at the cost of each candidate change-point considered, as in the heat map below.
algo.levs <- c("OPART","PELT","FPOP","DUST")
(both_index <- addSim(rbindlist(both_index_list, use.names=TRUE))[, let(
Algorithm = factor(algo, algo.levs)
)][])
## N_data simulation algo data_i change_i cost Simulation Algorithm
## <num> <char> <char> <int> <num> <num> <char> <fctr>
## 1: 40 constant_changes OPART 1 1 -76.51163 \nconstant_changes OPART
## 2: 40 constant_changes OPART 2 1 -91.33987 \nconstant_changes OPART
## 3: 40 constant_changes OPART 2 2 -41.99613 \nconstant_changes OPART
## 4: 40 constant_changes OPART 3 1 -83.68055 \nconstant_changes OPART
## 5: 40 constant_changes OPART 3 2 -50.42746 \nconstant_changes OPART
## ---
## 191072: 400 linear_changes DUST 396 391 -130.71096 \nlinear_changes DUST
## 191073: 400 linear_changes DUST 397 391 -130.71096 \nlinear_changes DUST
## 191074: 400 linear_changes DUST 398 391 -130.71096 \nlinear_changes DUST
## 191075: 400 linear_changes DUST 399 391 -130.71096 \nlinear_changes DUST
## 191076: 400 linear_changes DUST 400 391 -130.71096 \nlinear_changes DUST
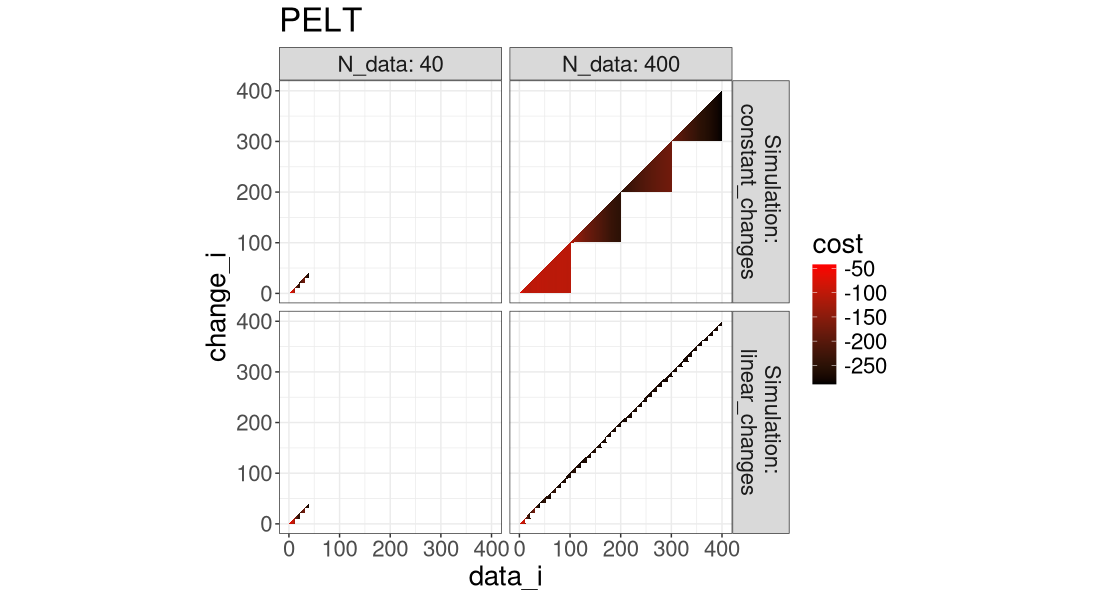
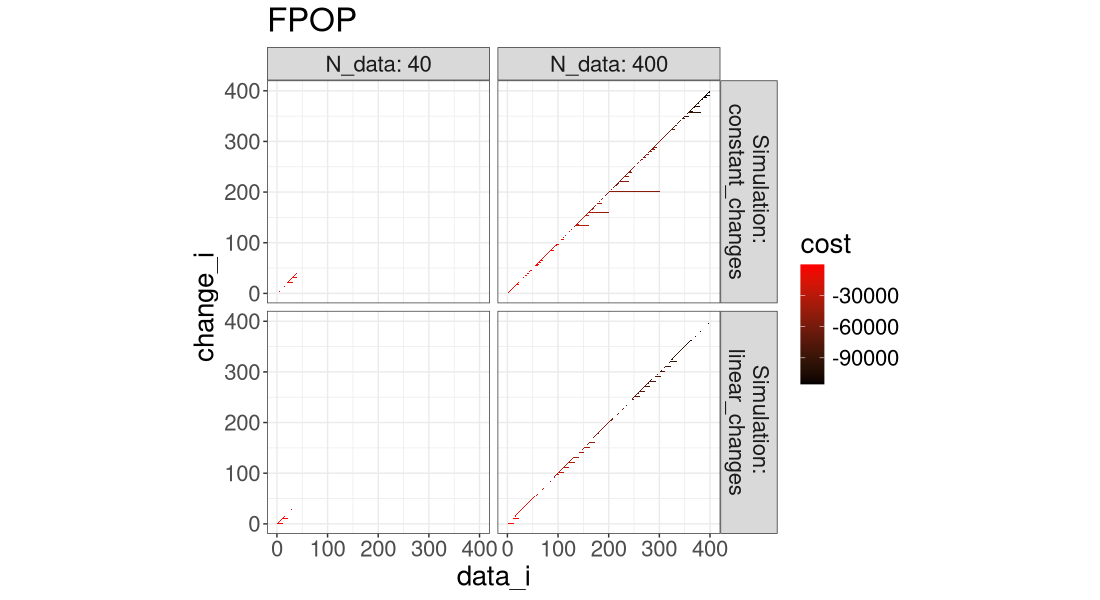
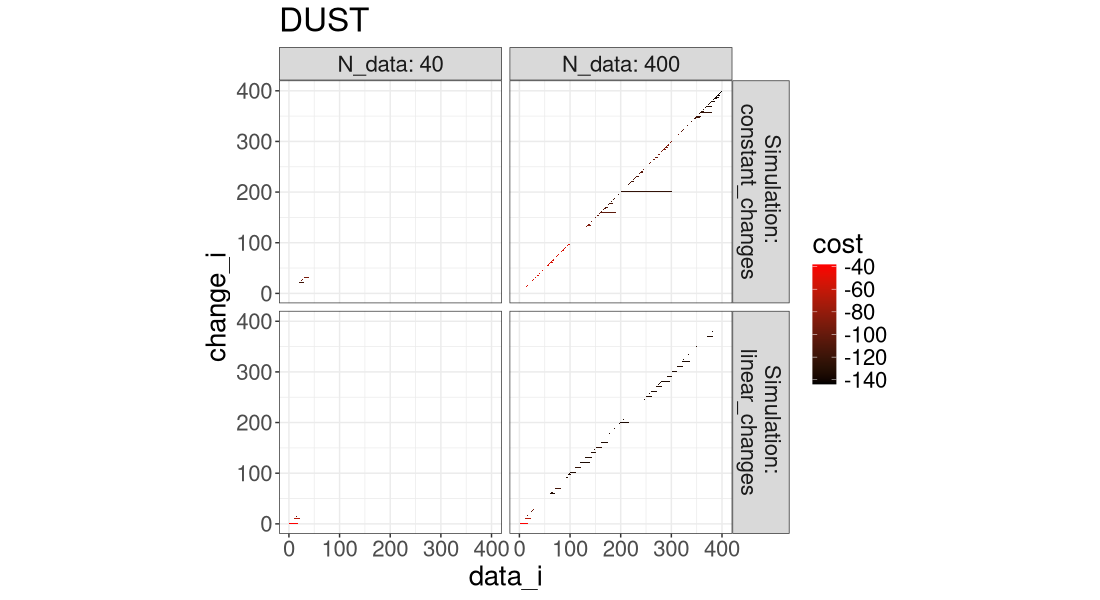
for(a in algo.levs){
gg <- ggplot()+
ggtitle(a)+
theme_bw()+
theme(
text=element_text(size=20))+
coord_equal()+
geom_tile(aes(
data_i, change_i, fill=cost),
data=both_index[Algorithm==a])+
scale_fill_gradient(low="black", high="red")+
facet_grid(Simulation ~ N_data, label=label_both)
print(gg)
}
Another way to visualize it is in the plot below, which super-imposes the three algos.
ggplot()+
theme_bw()+
theme(
legend.position=c(0.8, 0.2),
text=element_text(size=15))+
geom_tile(aes(
data_i, change_i, fill=Algorithm),
data=both_index)+
scale_fill_manual(values=algo.colors)+
scale_x_continuous(
breaks=seq(0,max(N_data_vec),by=20))+
facet_grid(Simulation ~ N_data, label=label_both, scales="free", space="free")
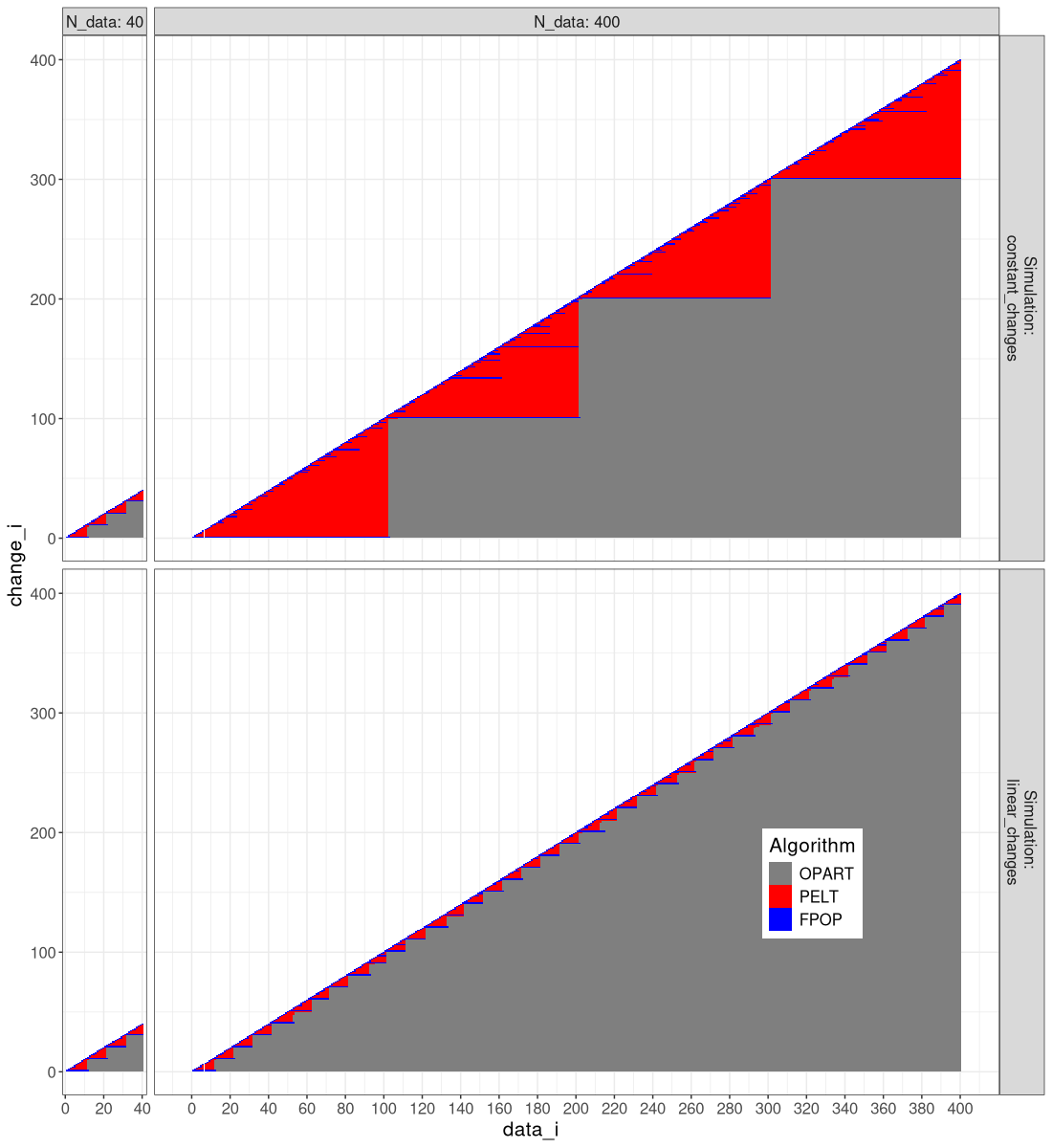
It is clear that FPOP/DUST prune much more than PELT, especially in the case of constant changes (segments that get larger with the overall number of data).
Double check FPOP for constant changes
Before running a simulation on varying data sizes, here we check that the penalty value results in the right number of change-points, for a larger data set.
N_data <- 1e5
sim_fun <- sim_fun_list$constant_changes
data_mean_vec <- sim_fun(N_data)
set.seed(1)
data_value <- rnorm(N_data, data_mean_vec, 2)
wfit <- fpopw::Fpop(data_value, penalty)
dfit <- dust::dust.1D(data_value, penalty)
rbind(
FPOP=wfit$t.est,
DUST=dfit$changepoints)
## [,1] [,2] [,3] [,4]
## FPOP 25000 50000 75000 1e+05
## DUST 25000 50000 75000 1e+05
The result above shows that there are four segments detected (three change-points), which is the expected number in our “constant changes” simulation.
atime comparison
The atime() function can be used to perform asymptotic time/memory/etc comparisons.
This means that we will increase N, and monitor how fast certain quantities grow with N.
We begin by defining the data sizes N of interest:
base_N <- c(100,200,400,800)
(all_N <- unlist(lapply(10^seq(0,5), function(x)x*base_N)))
## [1] 1e+02 2e+02 4e+02 8e+02 1e+03 2e+03 4e+03 8e+03 1e+04 2e+04 4e+04 8e+04 1e+05 2e+05 4e+05 8e+05 1e+06 2e+06 4e+06
## [20] 8e+06 1e+07 2e+07 4e+07 8e+07
The data sizes above are on a log scale between 10 and 1,000,000. Next, we define a list that enumerates the different combinations in the experiment.
grid_args <- list(
list(simulation=names(sim_fun_list)),
DUST=quote({
dfit <- dust::dust.1D(data_list[[simulation]], penalty)
with(dfit, data.frame(
mean_candidates=mean(nb),
segments=length(changepoints),
max_seg_size=max(diff(c(0,changepoints)))))
}),
FPOP=quote({
pfit <- fpopw::Fpop(
data_list[[simulation]], penalty, verbose_file=tempfile())
count_dt <- pfit$model[, .(intervals=.N), by=data_i]
data.frame(
mean_candidates=mean(count_dt$intervals),
segments=length(pfit$t.est),
max_seg_size=max(diff(c(0,pfit$t.est))))
}))
for(algo in names(algo.prune)){
prune <- algo.prune[[algo]]
grid_args[[algo]] <- substitute({
data_value <- data_list[[simulation]]
fit <- PELT(data_value, penalty, prune=prune)
dec <- decode(fit$change)
data.frame(
mean_candidates=mean(fit$candidates),
segments=nrow(dec),
max_seg_size=max(diff(c(0,dec$last.i))))
}, list(prune=prune))
}
(expr.list <- do.call(atime::atime_grid, grid_args))
## $`DUST simulation=constant_changes`
## {
## dfit <- dust::dust.1D(data_list[["constant_changes"]], penalty)
## with(dfit, data.frame(mean_candidates = mean(nb), segments = length(changepoints),
## max_seg_size = max(diff(c(0, changepoints)))))
## }
##
## $`DUST simulation=linear_changes`
## {
## dfit <- dust::dust.1D(data_list[["linear_changes"]], penalty)
## with(dfit, data.frame(mean_candidates = mean(nb), segments = length(changepoints),
## max_seg_size = max(diff(c(0, changepoints)))))
## }
##
## $`FPOP simulation=constant_changes`
## {
## pfit <- fpopw::Fpop(data_list[["constant_changes"]], penalty,
## verbose_file = tempfile())
## count_dt <- pfit$model[, .(intervals = .N), by = data_i]
## data.frame(mean_candidates = mean(count_dt$intervals), segments = length(pfit$t.est),
## max_seg_size = max(diff(c(0, pfit$t.est))))
## }
##
## $`FPOP simulation=linear_changes`
## {
## pfit <- fpopw::Fpop(data_list[["linear_changes"]], penalty,
## verbose_file = tempfile())
## count_dt <- pfit$model[, .(intervals = .N), by = data_i]
## data.frame(mean_candidates = mean(count_dt$intervals), segments = length(pfit$t.est),
## max_seg_size = max(diff(c(0, pfit$t.est))))
## }
##
## $`OPART simulation=constant_changes`
## {
## data_value <- data_list[["constant_changes"]]
## fit <- PELT(data_value, penalty, prune = FALSE)
## dec <- decode(fit$change)
## data.frame(mean_candidates = mean(fit$candidates), segments = nrow(dec),
## max_seg_size = max(diff(c(0, dec$last.i))))
## }
##
## $`OPART simulation=linear_changes`
## {
## data_value <- data_list[["linear_changes"]]
## fit <- PELT(data_value, penalty, prune = FALSE)
## dec <- decode(fit$change)
## data.frame(mean_candidates = mean(fit$candidates), segments = nrow(dec),
## max_seg_size = max(diff(c(0, dec$last.i))))
## }
##
## $`PELT simulation=constant_changes`
## {
## data_value <- data_list[["constant_changes"]]
## fit <- PELT(data_value, penalty, prune = TRUE)
## dec <- decode(fit$change)
## data.frame(mean_candidates = mean(fit$candidates), segments = nrow(dec),
## max_seg_size = max(diff(c(0, dec$last.i))))
## }
##
## $`PELT simulation=linear_changes`
## {
## data_value <- data_list[["linear_changes"]]
## fit <- PELT(data_value, penalty, prune = TRUE)
## dec <- decode(fit$change)
## data.frame(mean_candidates = mean(fit$candidates), segments = nrow(dec),
## max_seg_size = max(diff(c(0, dec$last.i))))
## }
##
## attr(,"parameters")
## expr.name expr.grid simulation
## <char> <char> <char>
## 1: DUST simulation=constant_changes DUST constant_changes
## 2: DUST simulation=linear_changes DUST linear_changes
## 3: FPOP simulation=constant_changes FPOP constant_changes
## 4: FPOP simulation=linear_changes FPOP linear_changes
## 5: OPART simulation=constant_changes OPART constant_changes
## 6: OPART simulation=linear_changes OPART linear_changes
## 7: PELT simulation=constant_changes PELT constant_changes
## 8: PELT simulation=linear_changes PELT linear_changes
Above we see a list with 8 expressions to run, and a data table with the corresponding number of rows. Note that each expression
- returns a data frame with one row and three columns that will be used as units to analyze as a function of N.
- should depend on data size N, which does not appear in the
expressions above, but it is used to define
data_listin thesetupargument below:
cache.rds <- "2025-04-15-PELT-vs-fpopw.rds"
if(file.exists(cache.rds)){
atime_list <- readRDS(cache.rds)
}else{
atime_list <- atime::atime(
N=all_N,
setup={
data_list <- list()
for(simulation in names(sim_fun_list)){
sim_fun <- sim_fun_list[[simulation]]
data_mean_vec <- sim_fun(N)
set.seed(1)
data_list[[simulation]] <- rnorm(N, data_mean_vec, 2)
}
},
expr.list=expr.list,
seconds.limit=1,
result=TRUE)
saveRDS(atime_list, cache.rds)
}
Note in the code above that we run the timing inside if(file.exists, which is a caching mechanism.
The result is time-consuming to compute, so the first time it is computed, it is saved to disk as an RDS file, and then subsequently read from disk, to save time.
Finally, we plot the different units as a function of data size N, in the figure below.
refs_list <- atime::references_best(atime_list)
ggplot()+
theme(text=element_text(size=12))+
directlabels::geom_dl(aes(
N, empirical, color=expr.grid, label=expr.grid),
data=refs_list$measurements,
method="right.polygons")+
geom_line(aes(
N, empirical, color=expr.grid),
data=refs_list$measurements)+
scale_color_manual(
"algorithm",
guide="none",
values=algo.colors)+
facet_grid(unit ~ simulation, scales="free")+
scale_x_log10(
"N = number of data in sequence",
breaks=10^seq(2,6),
limits=c(NA, 1e8))+
scale_y_log10("")
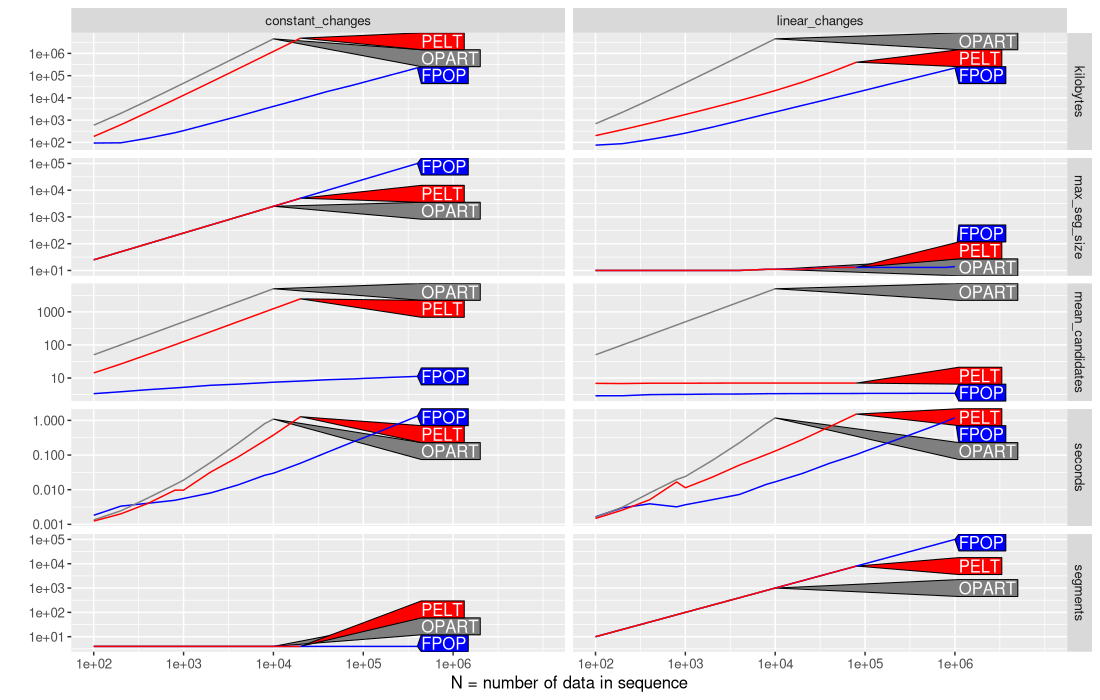
Above the figure shows a different curve for each algorithm, and a different panel for each simulation and measurement unit. We can observe that
- PELT memory usage in kilobytes has a larger slope for constant changes, than for linear changes. This implies a larger asymptotic complexity class.
- The maximum segment size,
max_seg_size, is the same for all algos, indicating that the penalty was chosen appropriately, and the algorithms are computing the same optimal solution. - Similarly, the mean number of candidates considered by the PELT algorithm has a larger slope for constant changes (same as OPART/linear in N), than for linear changes (relatively constant).
- For PELT seconds, we see a slightly larger slope for seconds in constant changes, compared to linear changes.
- As expected, number of
segmentsis constant for a constant number of changes (left), and increasing for a linear number of changes (right).
Below we plot the same data in a different way, that facilitates comparisons across the type of simulation:
refs_list$meas[, let(
Simulation = sub("_","\n",simulation),
Algorithm = factor(expr.grid, algo.levs)
)][]
## unit expr.name fun.name fun.latex expr.grid simulation N min
## <char> <char> <char> <char> <char> <char> <num> <num>
## 1: kilobytes DUST simulation=constant_changes N N DUST constant_changes 1e+02 0.0003440930
## 2: kilobytes DUST simulation=linear_changes N N DUST linear_changes 1e+02 0.0003319740
## 3: kilobytes FPOP simulation=constant_changes N log N N \\log N FPOP constant_changes 1e+02 0.0010634530
## 4: kilobytes FPOP simulation=linear_changes N N FPOP linear_changes 1e+02 0.0008895912
## 5: kilobytes OPART simulation=constant_changes N^2 N^2 OPART constant_changes 1e+02 0.0012234050
## ---
## 551: max_seg_size DUST simulation=linear_changes <NA> <NA> DUST linear_changes 2e+06 0.1745800580
## 552: max_seg_size DUST simulation=constant_changes N N DUST constant_changes 4e+06 1.4330559800
## 553: max_seg_size DUST simulation=linear_changes <NA> <NA> DUST linear_changes 4e+06 0.3500808589
## 554: max_seg_size DUST simulation=linear_changes <NA> <NA> DUST linear_changes 8e+06 0.7785552479
## 555: max_seg_size DUST simulation=linear_changes <NA> <NA> DUST linear_changes 1e+07 0.9580125660
## median itr/sec gc/sec n_itr n_gc result
## <num> <num> <num> <int> <num> <list>
## 1: 0.0003712554 2454.4469723 0.0000000 10 0 <data.frame[1x3]>
## 2: 0.0003471415 2756.5684704 0.0000000 10 0 <data.frame[1x3]>
## 3: 0.0013680826 671.6772182 0.0000000 10 0 <data.frame[1x3]>
## 4: 0.0009680756 1045.1979132 0.0000000 10 0 <data.frame[1x3]>
## 5: 0.0013303495 748.7730286 0.0000000 10 0 <data.frame[1x3]>
## ---
## 551: 0.1790242815 5.6581400 5.6581400 5 5 <data.frame[1x3]>
## 552: 1.4663964449 0.6724955 0.7397451 10 11 <data.frame[1x3]>
## 553: 0.3759252669 2.4664677 2.9597613 10 12 <data.frame[1x3]>
## 554: 0.9063347740 1.1508771 1.8414033 10 16 <data.frame[1x3]>
## 555: 1.1294077394 0.9009359 1.8919653 10 21 <data.frame[1x3]>
## time gc kilobytes
## <list> <list> <num>
## 1: 0.0006167080,0.0004174080,0.0003564690,0.0003697509,0.0004268159,0.0004773060,... <tbl_df[10x3]> 3.585938e+00
## 2: 0.0005097550,0.0003699249,0.0003539650,0.0003345360,0.0003319740,0.0003563149,... <tbl_df[10x3]> 3.585938e+00
## 3: 0.001563062,0.001173103,0.001144646,0.001063453,0.001070530,0.002711618,... <tbl_df[10x3]> 7.002344e+01
## 4: 0.0009703070,0.0009962391,0.0009237260,0.0008895912,0.0008919862,0.0010226031,... <tbl_df[10x3]> 6.784375e+01
## 5: 0.001551917,0.001356952,0.001350875,0.001369654,0.001245563,0.001309824,... <tbl_df[10x3]> 5.912969e+02
## ---
## 551: 0.1783938,0.1756855,0.1833944,0.1785470,0.1753685,0.1812852,... <tbl_df[10x3]> 7.500102e+04
## 552: 1.475066,1.493653,1.457727,1.562417,1.433056,1.450362,... <tbl_df[10x3]> 1.250020e+05
## 553: 0.3943201,0.4729741,0.3504990,0.4880445,0.3529972,0.4573742,... <tbl_df[10x3]> 1.500010e+05
## 554: 0.8952151,0.7785552,0.9344374,0.7881498,0.9174544,0.9198045,... <tbl_df[10x3]> 3.000008e+05
## 555: 1.235551,1.008993,1.220231,1.120291,1.015123,1.138524,... <tbl_df[10x3]> 3.750010e+05
## q25 q75 max mean sd mean_candidates segments max_seg_size
## <num> <num> <num> <num> <num> <num> <int> <num>
## 1: 0.0003498269 0.0004244639 0.000616708 0.0004074238 8.551939e-05 1.970000 4 25
## 2: 0.0003374740 0.0003557274 0.000509755 0.0003627699 5.299184e-05 1.760000 10 10
## 3: 0.0011483961 0.0016439211 0.002711618 0.0014888104 5.040464e-04 3.370000 4 25
## 4: 0.0009274510 0.0009892038 0.001022603 0.0009567566 4.471803e-05 2.910000 10 10
## 5: 0.0012891432 0.0013590138 0.001551917 0.0013355182 9.083811e-05 50.500000 4 25
## ---
## 551: 0.1763625847 0.1809086355 0.190087997 0.1796623020 4.573240e-03 1.832713 200000 14
## 552: 1.4518229705 1.5303621150 1.562417001 1.4869987807 4.971707e-02 16.791806 4 1000000
## 553: 0.3533985880 0.4690741207 0.488044514 0.4054381033 6.045301e-02 1.832841 399999 20
## 554: 0.7955587294 0.9239733572 0.934437368 0.8689025400 6.743490e-02 1.833660 799997 20
## 555: 1.0176718701 1.1890061875 1.235550567 1.1099569251 1.003971e-01 1.833507 999996 20
## expr.class expr.latex empirical
## <char> <char> <num>
## 1: DUST simulation=constant_changes\nN DUST simulation=constant_changes\n$O(N)$ 3.585938e+00
## 2: DUST simulation=linear_changes\nN DUST simulation=linear_changes\n$O(N)$ 3.585938e+00
## 3: FPOP simulation=constant_changes\nN log N FPOP simulation=constant_changes\n$O(N \\log N)$ 7.002344e+01
## 4: FPOP simulation=linear_changes\nN FPOP simulation=linear_changes\n$O(N)$ 6.784375e+01
## 5: OPART simulation=constant_changes\nN^2 OPART simulation=constant_changes\n$O(N^2)$ 5.912969e+02
## ---
## 551: DUST simulation=linear_changes\nNA DUST simulation=linear_changes\n$O(NA)$ 1.400000e+01
## 552: DUST simulation=constant_changes\nN DUST simulation=constant_changes\n$O(N)$ 1.000000e+06
## 553: DUST simulation=linear_changes\nNA DUST simulation=linear_changes\n$O(NA)$ 2.000000e+01
## 554: DUST simulation=linear_changes\nNA DUST simulation=linear_changes\n$O(NA)$ 2.000000e+01
## 555: DUST simulation=linear_changes\nNA DUST simulation=linear_changes\n$O(NA)$ 2.000000e+01
## Simulation Algorithm
## <char> <fctr>
## 1: constant\nchanges DUST
## 2: linear\nchanges DUST
## 3: constant\nchanges FPOP
## 4: linear\nchanges FPOP
## 5: constant\nchanges OPART
## ---
## 551: linear\nchanges DUST
## 552: constant\nchanges DUST
## 553: linear\nchanges DUST
## 554: linear\nchanges DUST
## 555: linear\nchanges DUST
ggplot()+
theme(
legend.position="none",
text=element_text(size=12))+
directlabels::geom_dl(aes(
N, empirical, color=Simulation, label=Simulation),
data=refs_list$measurements,
method="right.polygons")+
geom_line(aes(
N, empirical, color=Simulation),
data=refs_list$measurements)+
facet_grid(unit ~ Algorithm, scales="free")+
scale_x_log10(
"N = number of data in sequence",
breaks=10^seq(2,6),
limits=c(NA, 1e8))+
scale_y_log10("")
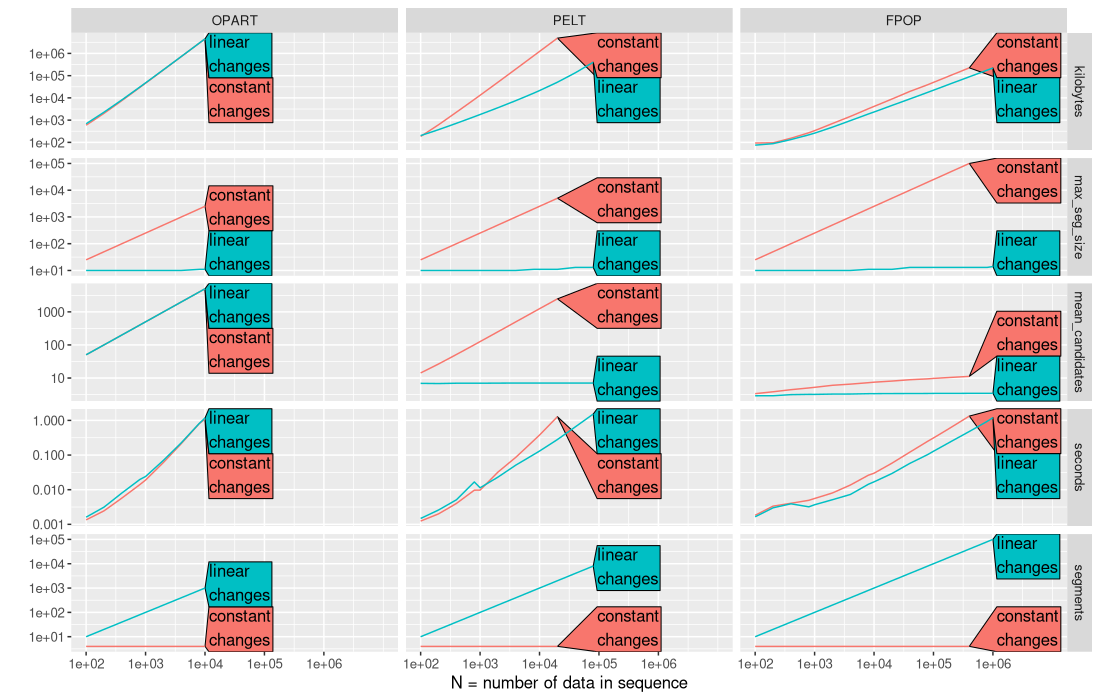
The plot above makes it easier to notice some interesting trends in the mean number of candidates:
- For PELT and FPOP the mean number of candidates is increases for a constant number of changes, but at different rates (FPOP much slower than PELT).
expr.levs <- CJ(
algo=algo.levs,
simulation=names(sim_fun_list)
)[algo.levs, paste0(algo,"\n",simulation), on="algo"]
edit_expr <- function(DT)DT[
, expr.name := factor(sub(" simulation=", "\n", expr.name), expr.levs)]
edit_expr(refs_list$meas)
edit_expr(refs_list$plot.ref)
plot(refs_list)+
theme(panel.spacing=grid::unit(1.5,"lines"))
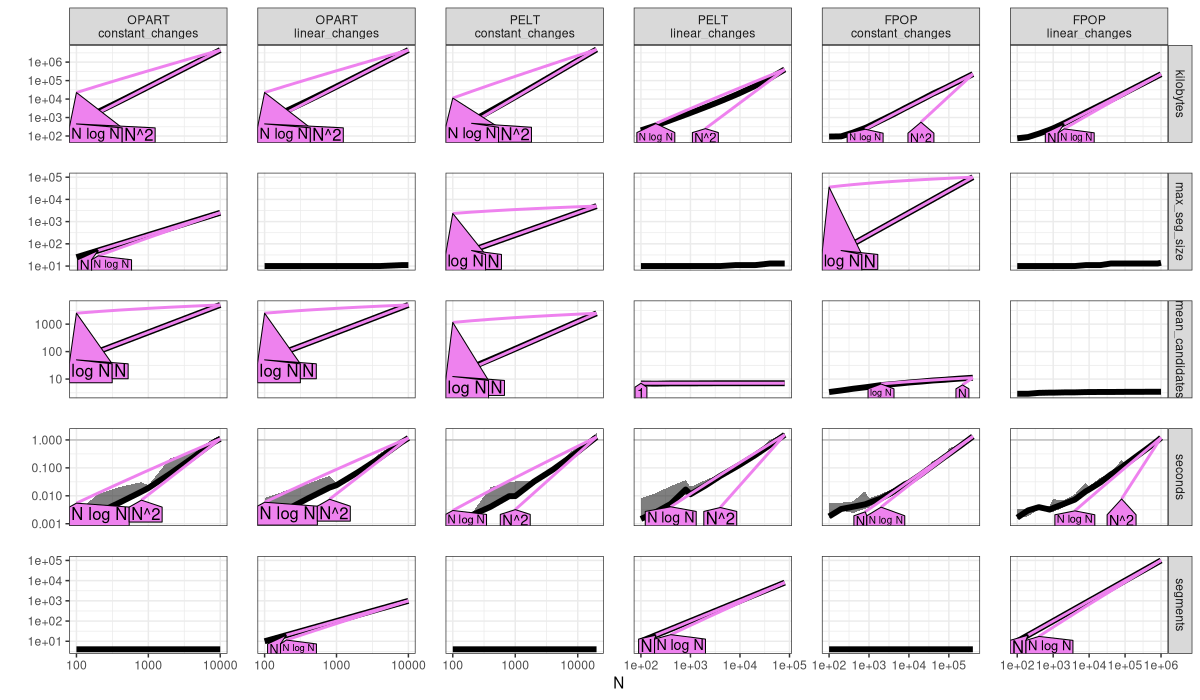
The plot above is an empirical verification of our earlier complexity claims.
- OPART
mean_candidatesis linear,O(N), and time and memory are quadratic,O(N^2). - PELT with constant changes has linear
mean_candidates,O(N), and quadratic time and memory,O(N^2)(same as OPART, no asymptotic speedup). - PELT with linear changes has sub-linear
mean_candidates(constant or log), and linear or log-linear time/memory. - FPOP always has sub-linear
mean_candidates(constant or log), and linear or log-linear time/memory.
The code/plot below shows the speedups in this case.
pred_list <- predict(refs_list)
ggplot()+
theme_bw()+
theme(text=element_text(size=20))+
geom_line(aes(
N, empirical, color=expr.grid),
data=pred_list$measurements[unit=="seconds"])+
directlabels::geom_dl(aes(
N, unit.value, color=expr.grid, label=sprintf(
"%s\n%s\nN=%s",
expr.grid,
ifelse(expr.grid %in% c("FPOP","DUST"), "C++", "R"),
format(round(N), big.mark=",", scientific=FALSE, trim=TRUE))),
data=pred_list$prediction,
method=list(cex=1.5,directlabels::polygon.method("top",offset.cm = 0.5)))+
scale_color_manual(
"algorithm",
guide="none",
values=algo.colors)+
facet_grid(. ~ simulation, scales="free", labeller=label_both)+
scale_x_log10(
"N = number of data in sequence",
breaks=10^seq(2,7),
limits=c(NA, 5e7))+
scale_y_log10(
"Computation time (seconds)",
breaks=10^seq(-3,0),
limits=10^c(-3,1))
## Warning: Removed 5 rows containing missing values or values outside the scale range (`geom_line()`).
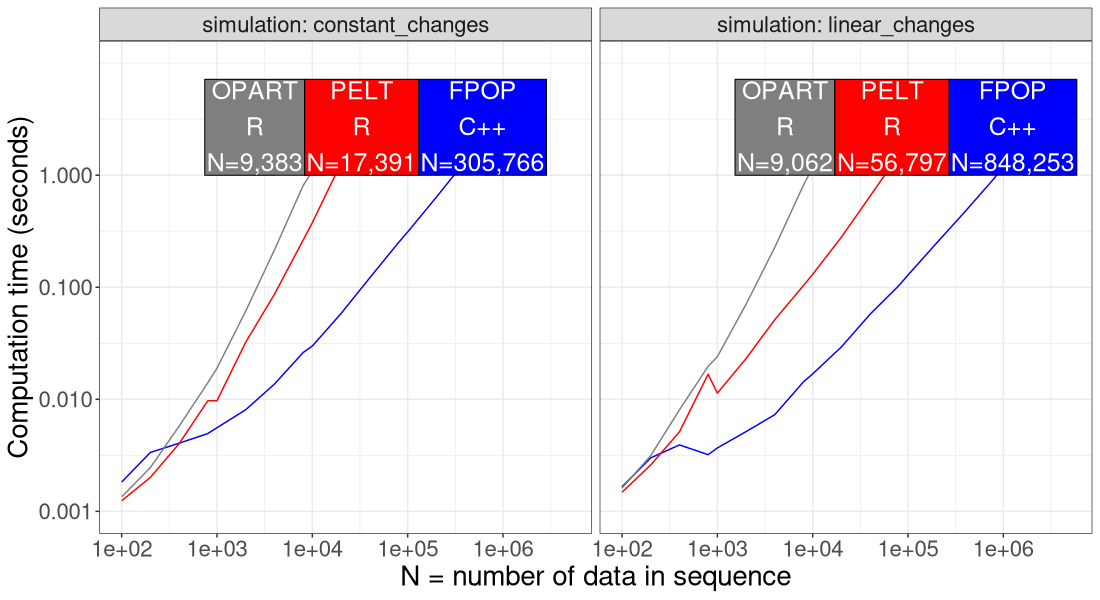
The figure above shows the throughput (data size N) which is possible to compute in 1 second using each algorithm. We see that FPOP is 10-100x faster than OPART/PELT. Part of the difference is that OPART/PELT were coded in R, whereas FPOP was coded in C++ (faster). Another difference is that FPOP is asymptotically faster with constant changes, as can be seen by a smaller slope for FPOP, compared to OPART/PELT.
Below we zoom in on the number of candidate change-points considered by each algorithm.
cand_dt <- pred_list$measurements[unit=="mean_candidates"]
ggplot()+
theme_bw()+
theme(text=element_text(size=20))+
geom_line(aes(
N, empirical, color=expr.grid),
data=cand_dt)+
directlabels::geom_dl(aes(
N, empirical, color=expr.grid, label=expr.grid),
data=cand_dt,
method=list(cex=2, "right.polygons"))+
scale_color_manual(
"algorithm",
guide="none",
values=algo.colors)+
facet_grid(. ~ simulation, scales="free", labeller=label_both)+
scale_x_log10(
"N = number of data in sequence",
breaks=10^seq(2,7),
limits=c(NA, 1e8))+
scale_y_log10(
"Mean number of candidate change-points",
limits=10^c(0, 4))
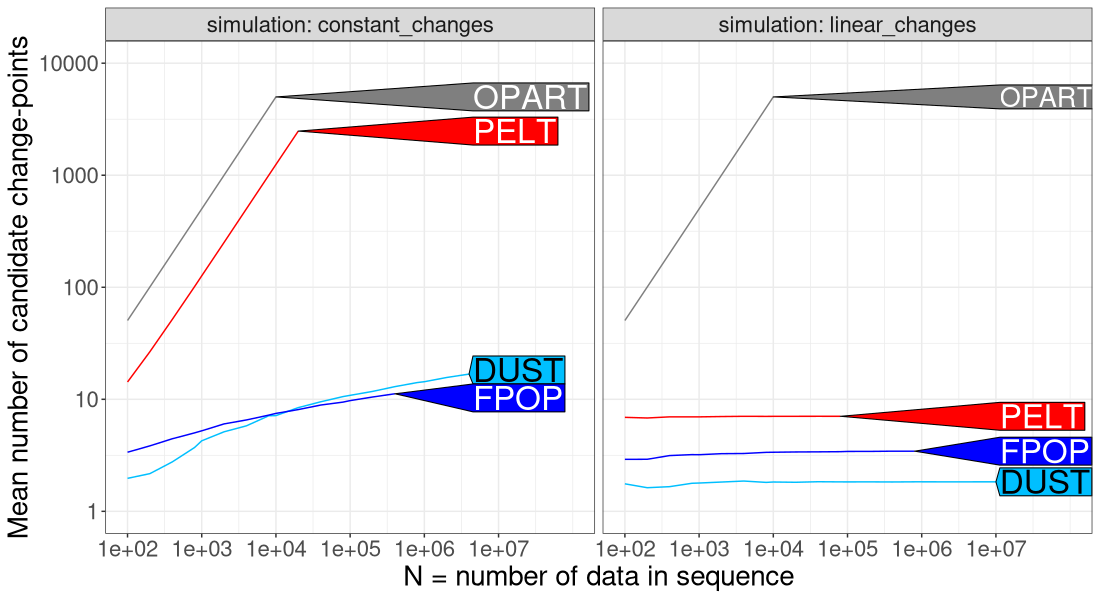
The figure above shows that
- OPART always considers a linear number of candidates (slow).
- PELT also considers a linear number of candidates (slow), when the number of changes is constant.
- PELT considers a sub-linear number of candidates (fast), when the number of changes is linear.
- FPOP always considers sub-linear number of candidates (fast), which is either constant for a linear number of changes, or logarithmic for a constant number of changes.
Conclusions
We have explored three algorithms for optimal change-point detection.
- The classic OPART algorithm is always quadratic time in the number of data to segment.
- The Pruned Exact Linear Time (PELT) algorithm can indeed be linear time in the number of data to segment, but only when the number of change-points grows with the number of data points. When the number of change-points is constant, there are ever-increasing segments, and the PELT algorithm must compute a cost for each candidate on these large segments; in this situation, PELT suffers from the same quadratic time complexity as OPART.
- The FPOP algorithm is fast (linear or log-linear) in both of the scenarios we examined.
Session info
sessionInfo()
## R Under development (unstable) (2025-05-21 r88220)
## Platform: x86_64-pc-linux-gnu
## Running under: Ubuntu 24.04.2 LTS
##
## Matrix products: default
## BLAS: /usr/lib/x86_64-linux-gnu/blas/libblas.so.3.12.0
## LAPACK: /usr/lib/x86_64-linux-gnu/lapack/liblapack.so.3.12.0 LAPACK version 3.12.0
##
## locale:
## [1] LC_CTYPE=fr_FR.UTF-8 LC_NUMERIC=C LC_TIME=fr_FR.UTF-8 LC_COLLATE=fr_FR.UTF-8
## [5] LC_MONETARY=fr_FR.UTF-8 LC_MESSAGES=fr_FR.UTF-8 LC_PAPER=fr_FR.UTF-8 LC_NAME=C
## [9] LC_ADDRESS=C LC_TELEPHONE=C LC_MEASUREMENT=fr_FR.UTF-8 LC_IDENTIFICATION=C
##
## time zone: Europe/Paris
## tzcode source: system (glibc)
##
## attached base packages:
## [1] stats graphics grDevices utils datasets methods base
##
## other attached packages:
## [1] mlr3resampling_2025.6.23 mlr3_1.0.0.9000 future_1.58.0 ggplot2_3.5.1
## [5] data.table_1.17.99
##
## loaded via a namespace (and not attached):
## [1] tidyselect_1.2.1 dust_0.3.0 dplyr_1.1.4 farver_2.1.2 filelock_1.0.3
## [6] fastmap_1.2.0 promises_1.3.2 paradox_1.0.1 digest_0.6.37 rpart_4.1.24
## [11] base64url_1.4 mime_0.13 lifecycle_1.0.4 ellipsis_0.3.2 processx_3.8.6
## [16] magrittr_2.0.3 compiler_4.6.0 rlang_1.1.6 progress_1.2.3 tools_4.6.0
## [21] knitr_1.50 prettyunits_1.2.0 labeling_0.4.3 brew_1.0-10 htmlwidgets_1.6.4
## [26] pkgbuild_1.4.7 curl_6.2.2 plyr_1.8.9 batchtools_0.9.17 pkgload_1.4.0
## [31] miniUI_0.1.1.1 withr_3.0.2 purrr_1.0.4 mlr3misc_0.18.0 desc_1.4.3
## [36] grid_4.6.0 urlchecker_1.0.1 profvis_0.4.0 mlr3measures_1.0.0 xtable_1.8-4
## [41] colorspace_2.1-1 globals_0.18.0 scales_1.3.0 cli_3.6.5 crayon_1.5.3
## [46] generics_0.1.3 remotes_2.5.0 future.apply_1.20.0 directlabels_2025.5.20 sessioninfo_1.2.3
## [51] atime_2025.5.24 cachem_1.1.0 parallel_4.6.0 fpopw_1.2 vctrs_0.6.5
## [56] devtools_2.4.5 animint2_2025.6.4 callr_3.7.6 hms_1.1.3 listenv_0.9.1
## [61] lgr_0.4.4 glue_1.8.0 parallelly_1.45.0 RJSONIO_1.3-1.9 codetools_0.2-20
## [66] ps_1.9.1 stringi_1.8.7 gtable_0.3.6 later_1.4.1 quadprog_1.5-8
## [71] palmerpenguins_0.1.1 munsell_0.5.1 tibble_3.2.1 pillar_1.10.2 rappdirs_0.3.3
## [76] htmltools_0.5.8.1 R6_2.6.1 lattice_0.22-7 evaluate_1.0.3 shiny_1.10.0
## [81] backports_1.5.0 memoise_2.0.1 httpuv_1.6.15 Rcpp_1.0.14 uuid_1.2-1
## [86] checkmate_2.3.2 xfun_0.51 fs_1.6.6 usethis_3.1.0 pkgconfig_2.0.3